修電蚊拍+改電蚊拍
新的電蚊拍用一段時間後,就會變的無力,
網路上許多文章都告知原因是電容的擊穿問題,
但拆解玩過幾支後發現,大多是電網因氧化提高了電阻,
造成電蚊只能短時間昏迷麻痺而無法擊斃,
除了電網氧化影響,還有電池及電容的老化的問題,
若手邊無電容無電池可換,就先把網面清理試試吧,
另電網電壓超過1000V,千萬不要拿一般電表量測電網電壓,
拆解時外表容易看到2個螺絲,另外還有2~3個螺絲,
隱藏在貼紙下,注意拆殼時先取金屬起子在電網上放電,
確認電容裡無電以免被電到,↓
取下螺絲拆蓋,此款是內建充電池,除了拍蚊時的壓按開關,
還有一個關閉電源的切換開關,尾端有插頭直接充電用,↓
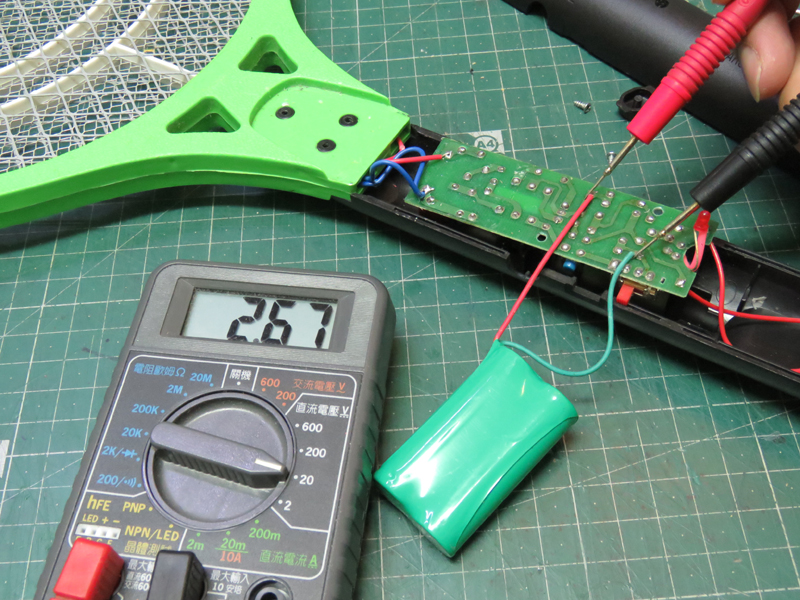
用三用電表量測電池2端,電池種類很多種,電壓都不太相同,
此款量測為DC2.67V,算是低了些,不過還可充電正常使用,
有些拍使用不可充電的乾電池,則為1.5V*2=3V,
有試改過使用18650電池也沒問題,充電式的電池應經常保持電力,
若到完全沒電又放著,就無法再蓄電了,↓
取下電路板,此款是充電式的,電路板接插頭的部分是充電器功能,
另前半部是從電池經過線圈升壓到電容,再一次放電到電網,
可在網路上搜尋電蚊拍電路圖,細部不同但原理相同,↓
發現大電容附近有明顯蠟質物影響燒焊,不知是不是電容的流出物,↓
取下最大的電容,一般為223J2KV的麥拉電容又稱薄膜電容,
此功能是將升壓的電流,儲存在此,再一次瞬間放電,
當電容的容量越大,所能放出的電流就越強,
而電容使用一段時間蓄電力就會降低或擊穿,
當擊穿時用電表可量測為短路狀態則為完全故障,
若只是降低電容量用一般電表是無法量測的,↓
準備2個新的電容,223J2KV,該標示2KV=2000V,
223=22*10^3次方=22000pF=0.022uF,J為正負差5%,
為加強電擊效果,將電容並接提升容量為2倍即0.044uF,↓
麥拉電容無極性,無分邊,將新電容焊上原腳位孔,並剪去多長的腳,↓
因安裝空間問題,另一個電容焊在板的背面,一樣不分極性,↓
都焊上後不急著安裝,取一字起子沿網邊拆開膠框取下電網,
共有3片,接線內正外負,用砂紙鋼刷等去除網上氧化物,
若有變形一併整形,會發現電網的金屬顏色差異很大,↓
都完成了就裝回,找實驗體去囉,不過通常都躲起來了,↓
近日蚊過多,另找一支老將維護,拆殼後先測電池是否正常,
電壓為4.28V沒問題,↓
取下最大的電容,一樣是使用223J 2000V,
這次要換上容量更大的563J,比223J*2更大,
因為563J2KV比較大顆,要注意空間,不過裝過大多都是可行的↓
電路板設計大同小異,一樣是後半部充電器,前半部升壓蓄電,↓
焊好電容先不裝回,沿著膠框拆下電網處理氧化及整形,
圖片砂紙附近磨過後的顏色明顯亮白,↓
563J2KV比較大顆,裝回"喬"一下就OK,老將重出江湖擊殺敵軍去,↓
要剛好找到實驗體並錄影實在困難,補上電擊蒼蠅後的結果,
雙眼大頭連著脊椎神經在電網上,身體已支離破碎,
屍首分離~慘不忍睹~千萬不要拿去惡作劇呀,↓
www.ee543.com